Bofan Chen
About Me
I am currently a Robotics Engineer on the Locomotion team at Cyan Robotics, focused on developing and implementing robust control policies for dynamic humanoid robots. My work spans the humanoid behavior foundation model, expressive gait generation, stability optimization, and enabling agile mobility in complex environments. My long-term goal is to leverage large-scale human data to build generalizable robotic systems capable of performing a wide range of human-like skills.
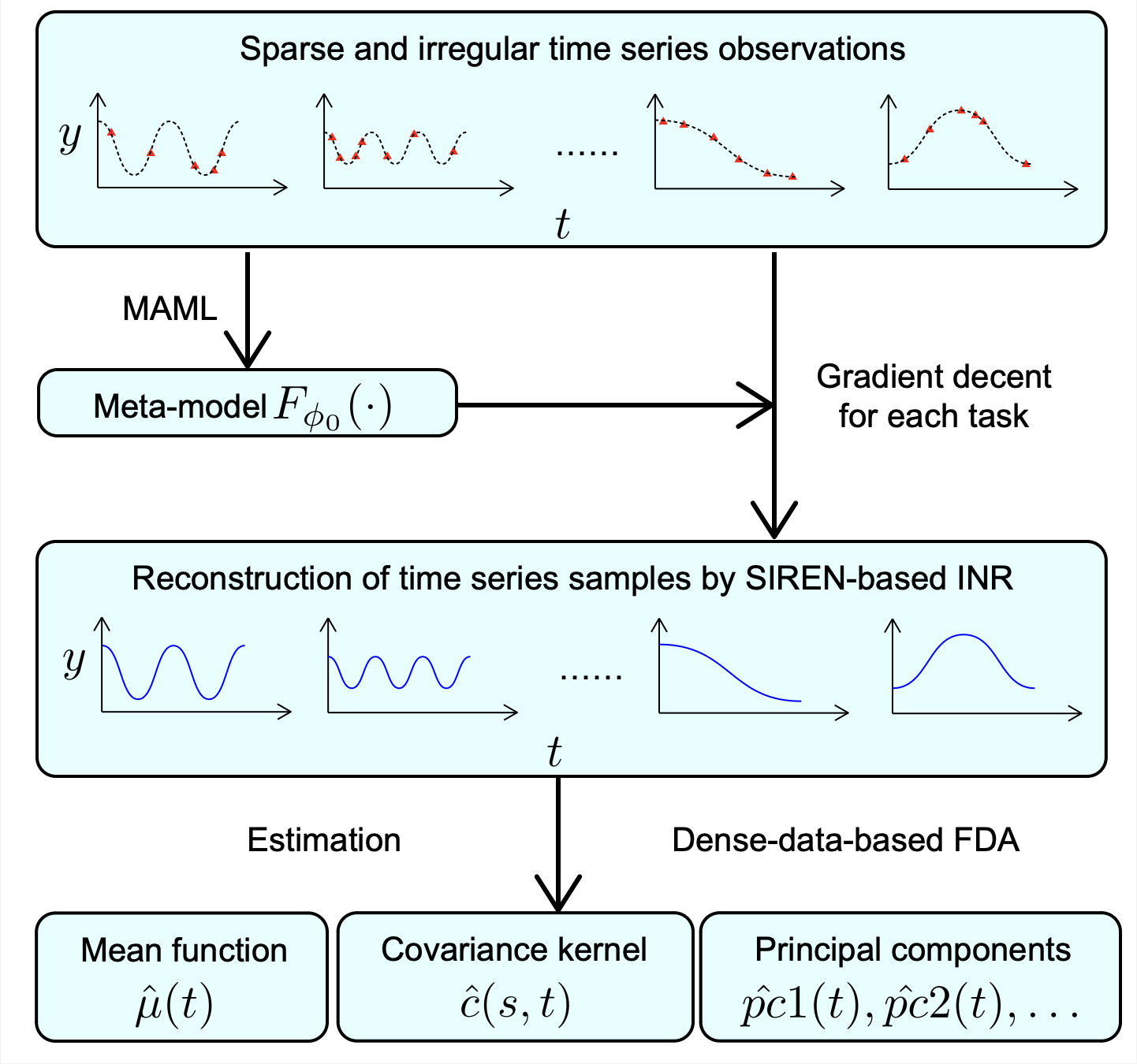
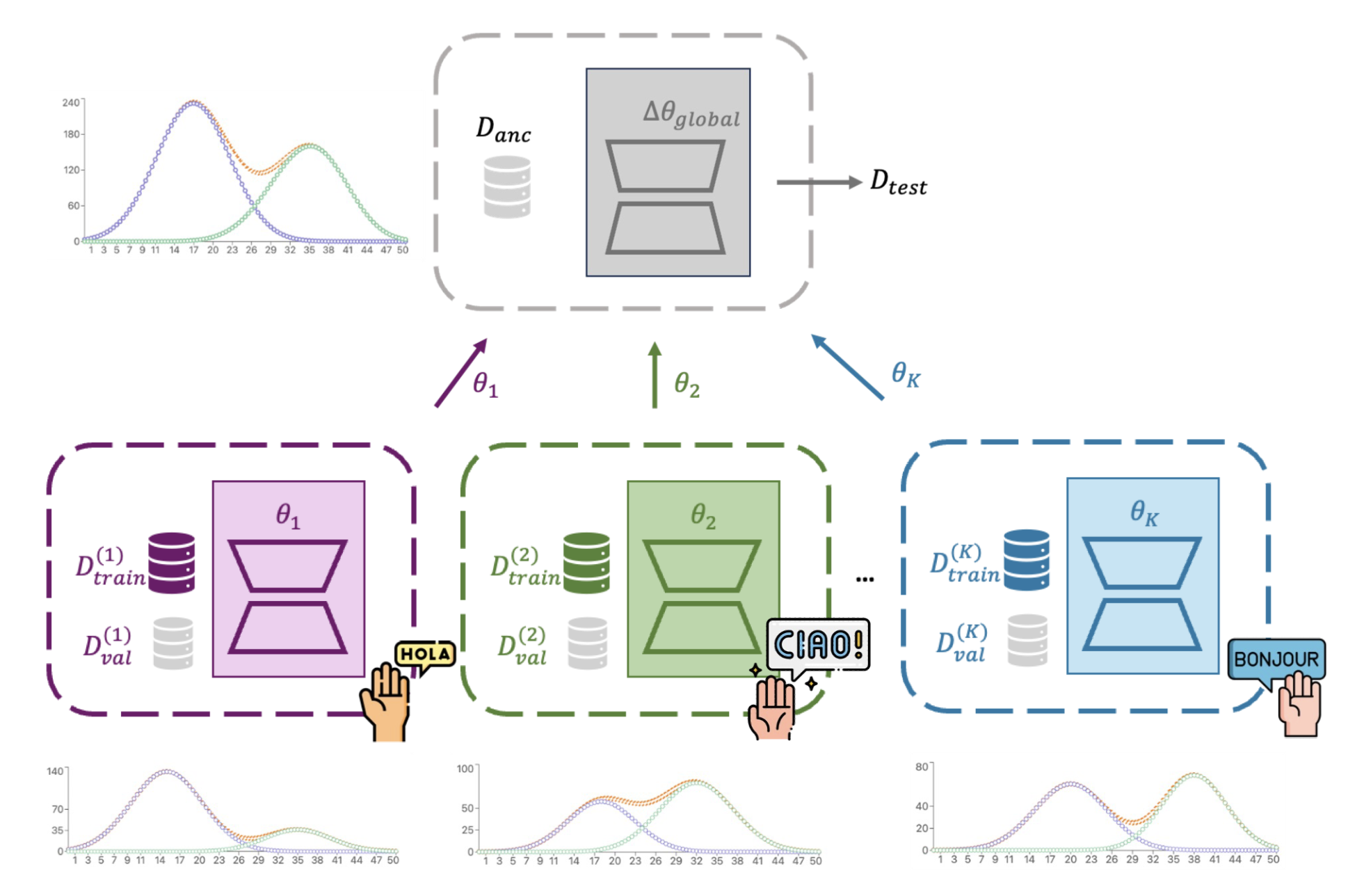
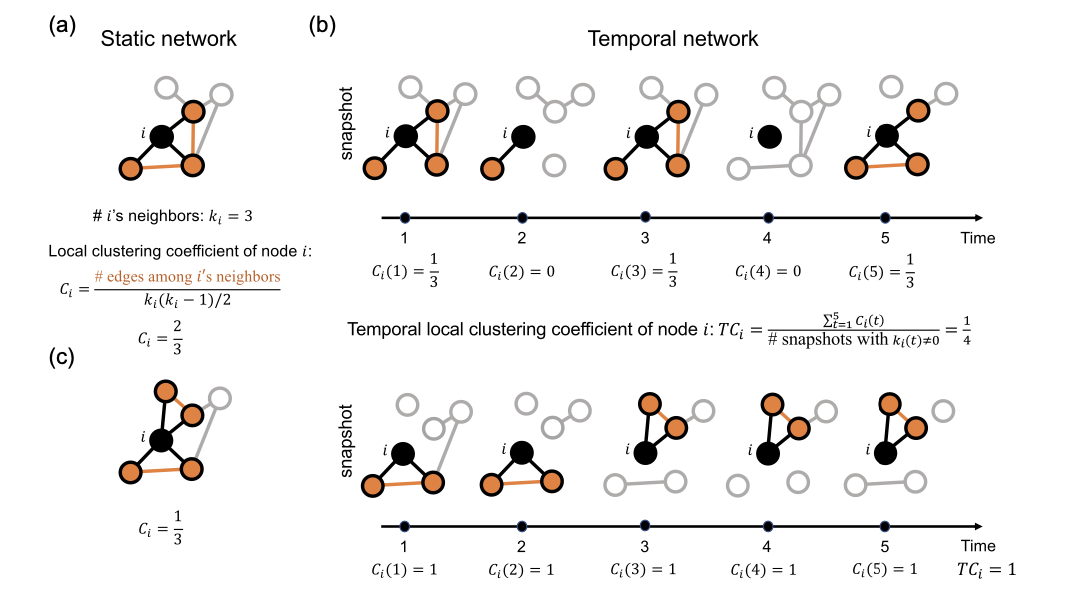
I previously earned my Master’s degree in Mathematics from the University of Cambridge, where I conducted research on meta-learning under the supervision of Professor Mihaela van der Schaar. During my master’s studies, I was also a visiting student at the CaMLSys Lab, working on data selection methods for large language models. Prior to that, I completed a dual Bachelor’s degree in Robotics and Finance at Peking University, where I collaborated with Professor Aming Li on temporal network analysis.
Research Interests
- Robot learning: Humanoid robot learning and control; Scaleble skill learning from scalable data; Perceptive locomotion; Humanoid-human-object interaction
- Machine Learning: meta-learning; network analysis
Projects
-
 Nov. 2025
zero-shot motion tracking; goal reaching
Nov. 2025
zero-shot motion tracking; goal reaching -
 Aug. 2025
Aug. 2025
-
 Mar. 2025
Mar. 2025
Publications
-
 Master Essay
Master Essay
-
 NeurIPS 2024
The Thirty-Eighth Annual Conference on Neural Information Processing Systems
NeurIPS 2024
The Thirty-Eighth Annual Conference on Neural Information Processing Systems -
 Phys. Rev. E
Phys. Rev. E